01、图
哈喽,大家好,我是厨子,今年给大家聊聊图
图是计算机科学中最重要的数据结构之一,它能够描述复杂的关系网络,从社交网络到交通系统,从编译器的依赖分析到搜索引擎的网页排名,图无处不在。
图的基本概念
图的定义和生活中的图
图(Graph)是由顶点(Vertex)集合和边(Edge)集合组成的数据结构,用来表示对象之间的关系。
数学定义: 图 G = (V, E),其中:
- V 是顶点集合,V = {v1, v2, ..., vn}
- E 是边集合,E = {e1, e2, ..., em}
生活中的图:
社交网络
- 顶点:每个人
- 边:朋友关系
城市交通网
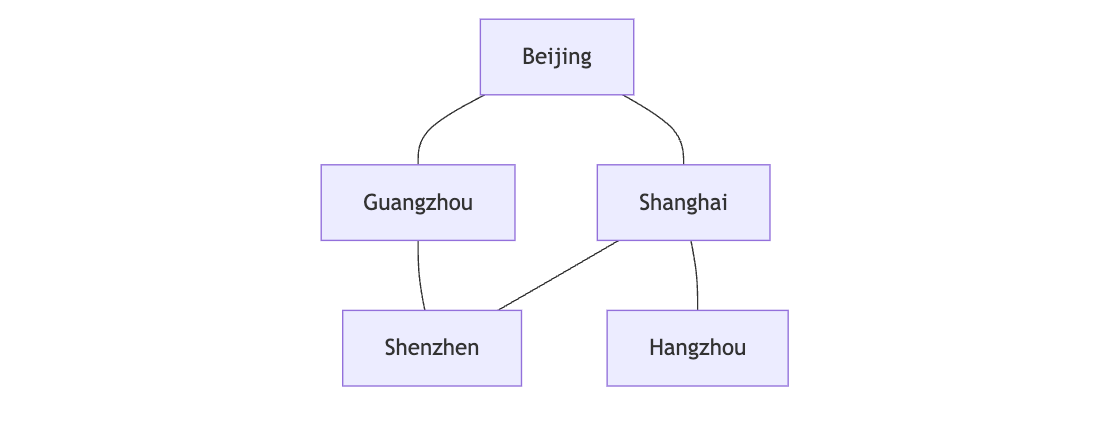
- 顶点:城市
- 边:交通路线
程序调用关系
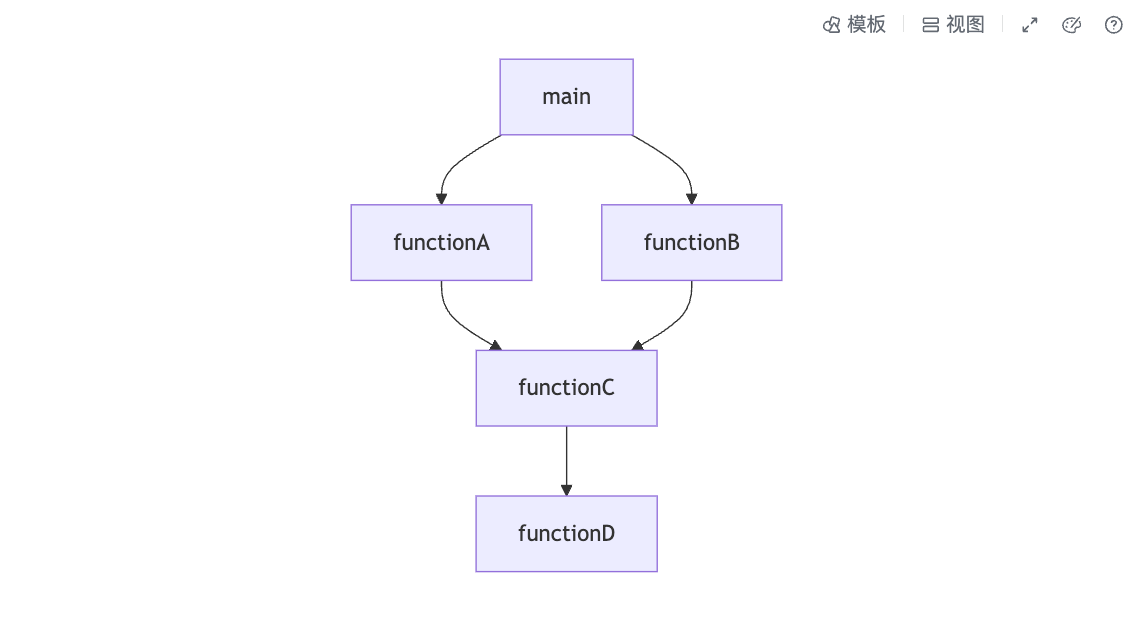
- 顶点:函数
- 边:调用关系
图的基本术语
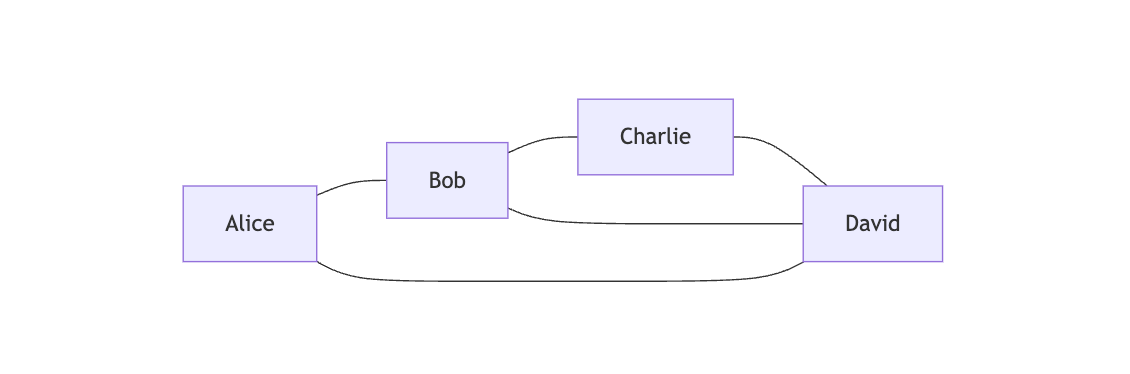
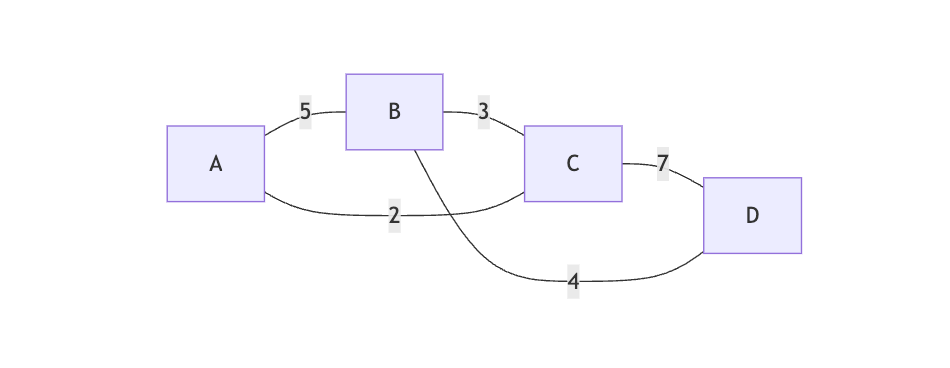
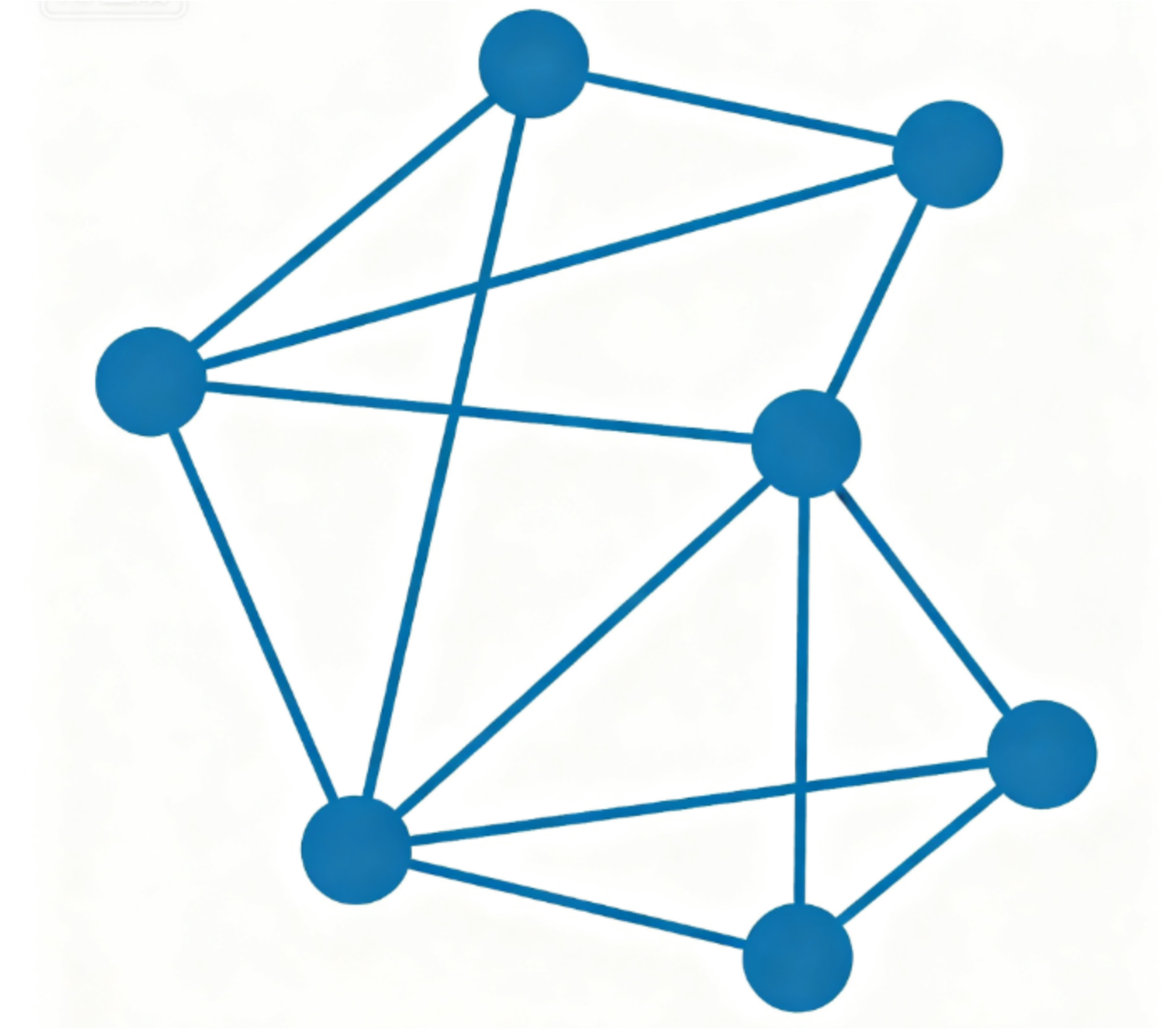
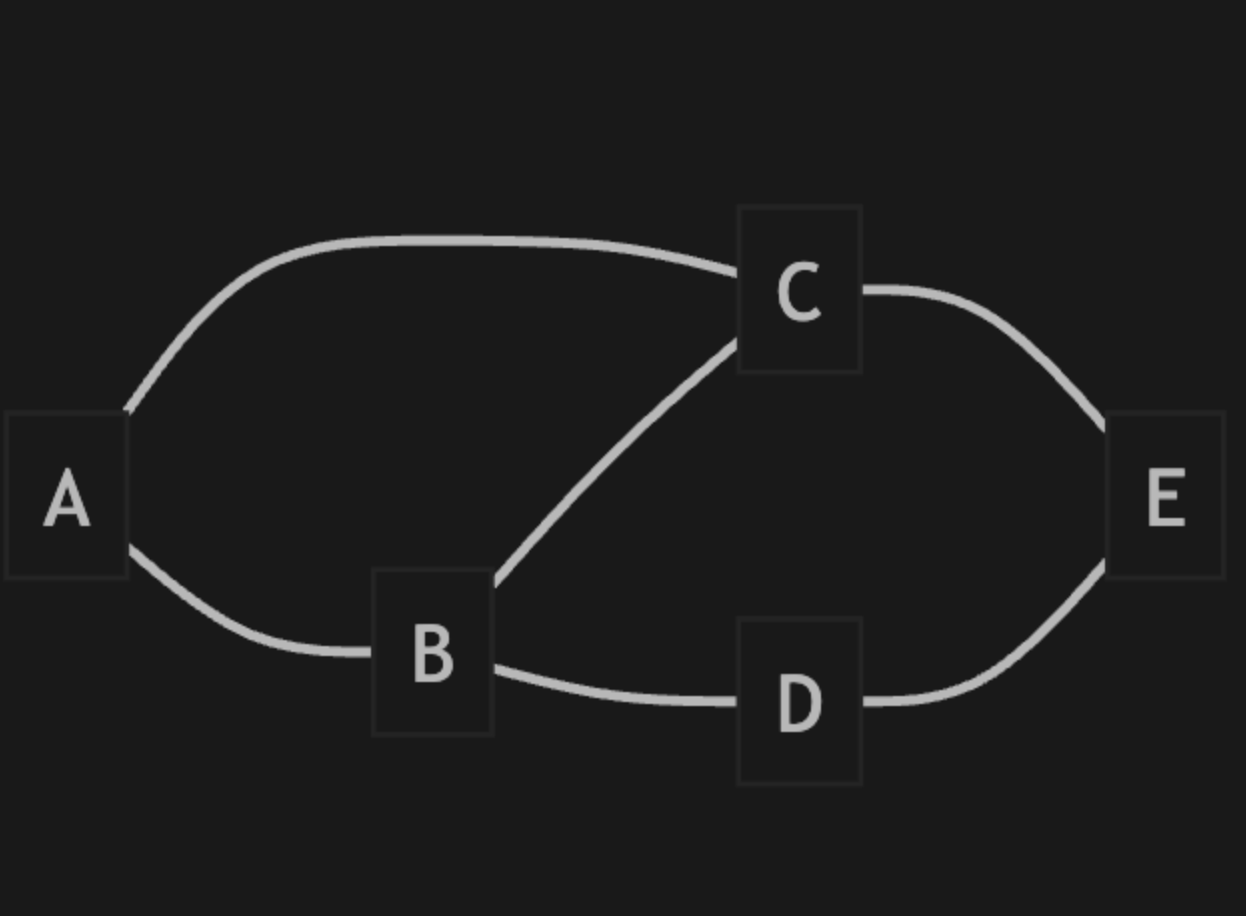
让我们通过一个具体的图来理解各种术语:
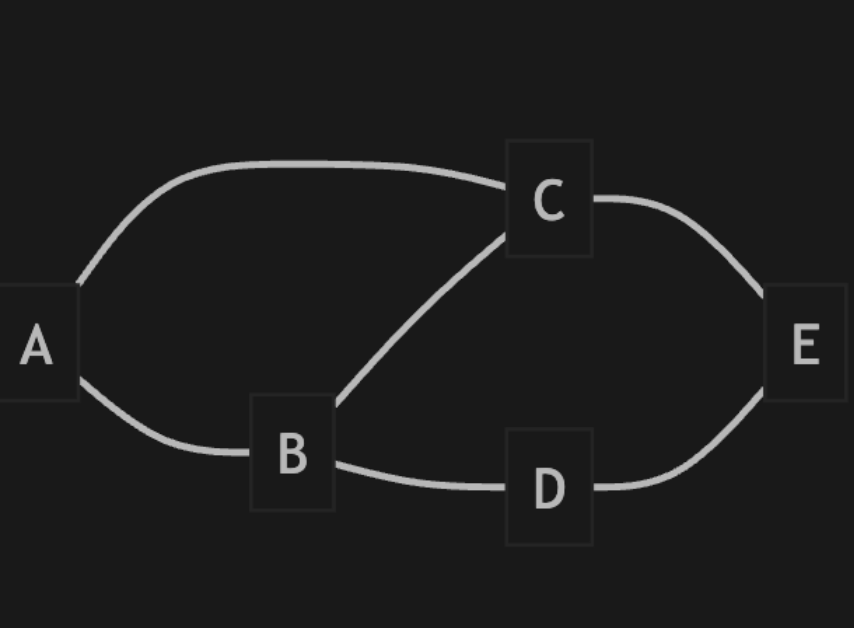
基本术语:
1. 顶点(Vertex/Node)
- 图中的基本单元,如上图中的 A, B, C, D, E
2. 边(Edge)
- 连接两个顶点的线,表示顶点间的关系
也就是上面的 AB,BC
3. 度(Degree)
- 与顶点相连的边的数量
- 上图中:deg(A) = 2, deg(B) = 3, deg(C) = 3, deg(D) = 2, deg(E) = 2
4. 路径(Path)
- 从一个顶点到另一个顶点经过的顶点序列
- 例如:A → B → D → E 是从 A 到 E 的一条路径
5. 路径长度
- 路径中边的数量
- A → B → D → E 路径的长度为 3
6. 简单路径
- 除起点和终点外,不重复经过任何顶点的路径
7. 环(Cycle)
- 起点和终点相同的简单路径
- 例如:A → B → C → A
8. 连通性
- 如果两个顶点之间存在路径,则称它们是连通的
C++中的基本定义(等学会了如何存储图再回过头来看):
#include <iostream>
#include <vector>
#include <string>
// 基本的图术语示例
class GraphTerms {
public:
struct Vertex {
int id;
std::string name;
std::vector<int> adjacentVertices; // 邻接顶点列表
Vertex(int i, std::string n) : id(i), name(n) {}
// 计算度数
int getDegree() const {
return adjacentVertices.size();
}
};
std::vector<Vertex> vertices;
// 添加顶点
void addVertex(int id, std::string name) {
vertices.emplace_back(id, name);
}
// 添加边(无向图)
void addEdge(int v1, int v2) {
if (v1 < vertices.size() && v2 < vertices.size()) {
vertices[v1].adjacentVertices.push_back(v2);
vertices[v2].adjacentVertices.push_back(v1);
}
}
// 打印图的基本信息
void printGraphInfo() {
std::cout << "图的基本信息:" << std::endl;
std::cout << "顶点数量: " << vertices.size() << std::endl;
int totalEdges = 0;
for (const auto& vertex : vertices) {
totalEdges += vertex.getDegree();
}
std::cout << "边数量: " << totalEdges / 2 << std::endl; // 无向图每条边被计算两次
std::cout << "\n各顶点的度数:" << std::endl;
for (const auto& vertex : vertices) {
std::cout << vertex.name << " (ID: " << vertex.id << "): 度数 = "
<< vertex.getDegree() << std::endl;
}
}
};
// 使用示例
void demonstrateBasicTerms() {
GraphTerms graph;
// 添加顶点
graph.addVertex(0, "A");
graph.addVertex(1, "B");
graph.addVertex(2, "C");
graph.addVertex(3, "D");
graph.addVertex(4, "E");
// 添加边
graph.addEdge(0, 1); // A-B
graph.addEdge(0, 2); // A-C
graph.addEdge(1, 2); // B-C
graph.addEdge(1, 3); // B-D
graph.addEdge(2, 4); // C-E
graph.addEdge(3, 4); // D-E
graph.printGraphInfo();
}
int main() {
demonstrateBasicTerms();
return 0;
}
图与其他数据结构的区别
与线性结构的区别:
| 特性 | 数组/链表 | 树 | 图 |
|---|---|---|---|
| 结构特点 | 线性序列 | 层次结构 | 网状结构 |
| 元素关系 | 前驱后继关系 | 父子关系 | 任意关系 |
| 连接数量 | 最多2个 | 父节点1个,子节点多个 | 任意数量 |
| 环的存在 | 无 | 无 | 可能有 |
| 遍历复杂度 | O(n) | O(n) | O(V+E) |
那我们来总结一下图的优势呢?
图的优势:
- 表达能力强:能表示复杂的多对多关系
- 应用广泛:网络、社交、地图、依赖关系等
所以图在实际开发中,应用场景也是蛮丰富的
示例对比:
// 线性结构:数组表示学生成绩
int scores[] = {85, 92, 78, 96, 88};
// 层次结构:树表示组织架构,父节点,子节点
class TreeNode {
public:
string position;
vector<TreeNode*> subordinates;
};
// 网状结构:图表示城市交通网
class CityGraph {
public:
struct City {
string name;
vector<pair<City*, int>> connections; // 连接的城市和距离
};
vector<City> cities;
};
我们了解了基本概念之后,我们来看下图的分类吧
图的分类
有向图 vs 无向图
无向图(Undirected Graph)
- 边没有方向性
- 边表示双向关系
- 如果存在边(u,v),则也存在边(v,u),他们是 完全相同的一条边
刚才提到的这个图就是无向图
有向图(Directed Graph/Digraph)
- 边有方向性
- 用箭头表示方向
- 边(u,v)和边(v,u)是不同的,因为此时边具有方向性
加权图 vs 无权图
无权图(Unweighted Graph)
- 边只表示连接关系
- 所有边的"权重"都相同(通常视为1)
加权图(Weighted Graph)
- 边带有权重值
- 权重可以表示距离、成本、容量等
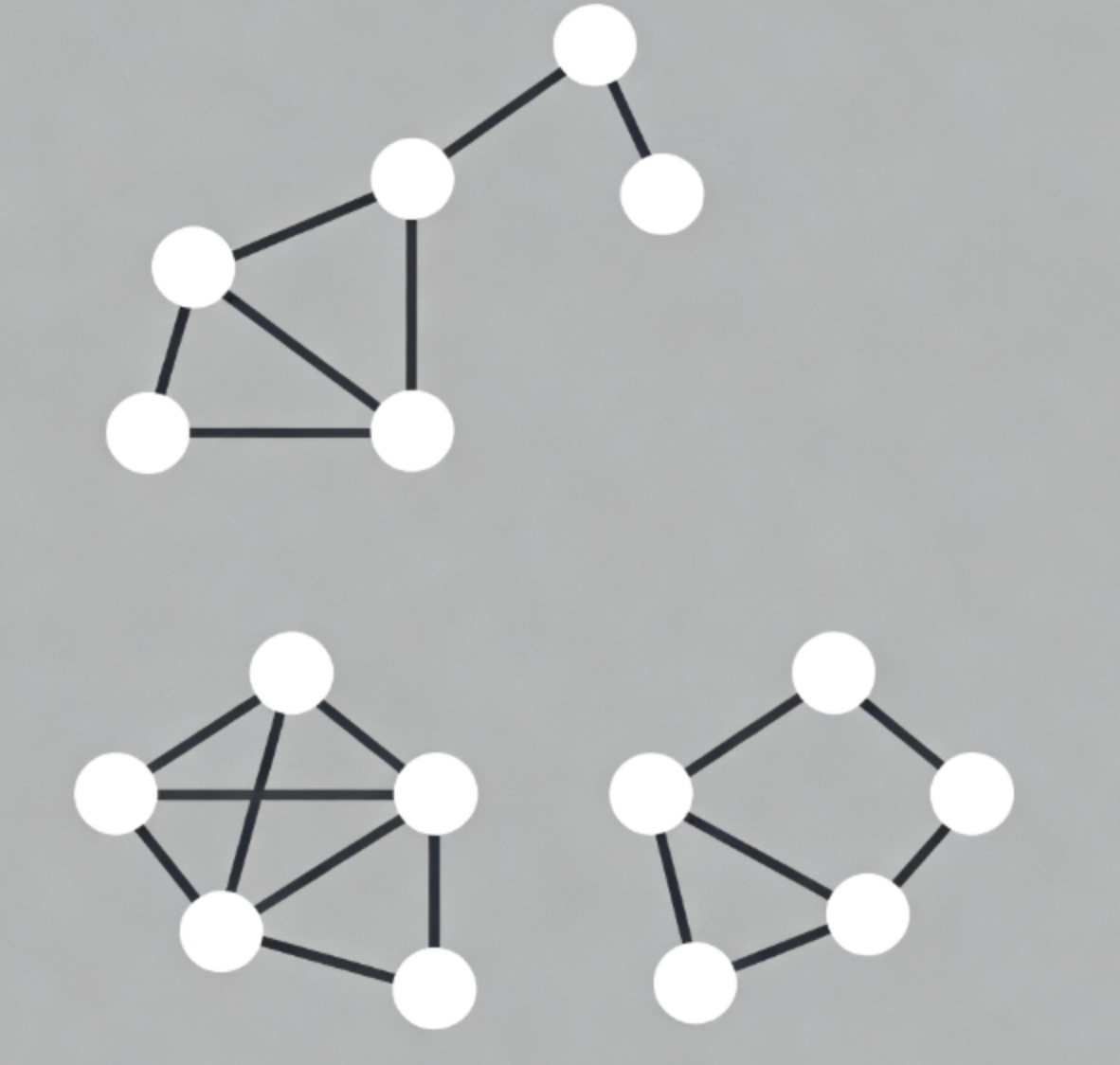
连通图 vs 非连通图
连通图(Connected Graph)
- 任意两个顶点之间都存在路径
- 整个图是一个连通分量
非连通图(Disconnected Graph)
- 存在某些顶点对之间没有路径
- 由多个连通分量组成
基本概念大家已经掌握了,现在给大家说一下特殊类型的图
特殊类型的图
完全图(Complete Graph)
完全图具有以下特性
- 任意两个不同顶点之间都有边相连
- n个顶点的完全图有 n(n-1)/2 条边(无向完全图)
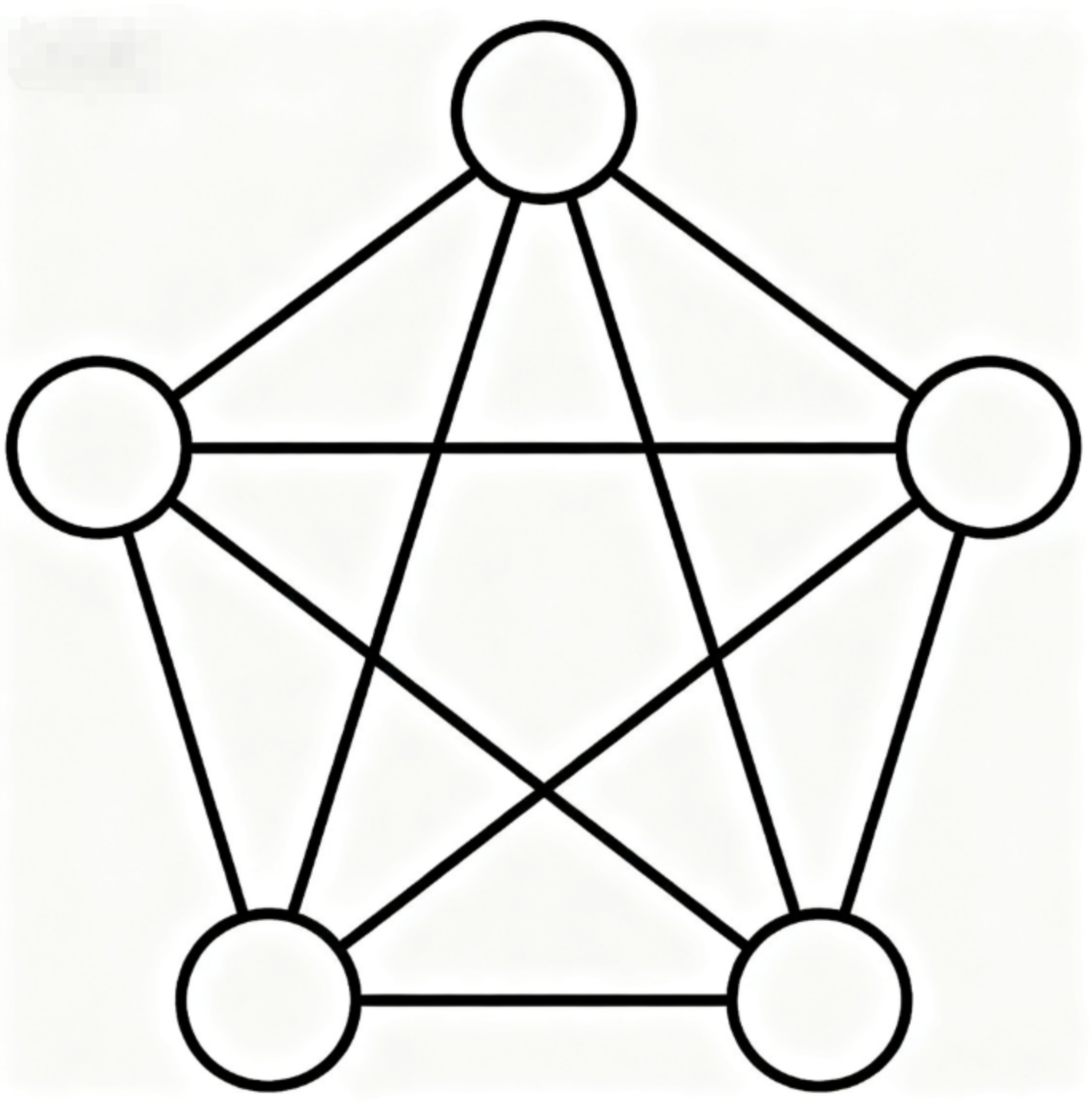
上图可以看到,每个顶点都有通向其他顶点的边
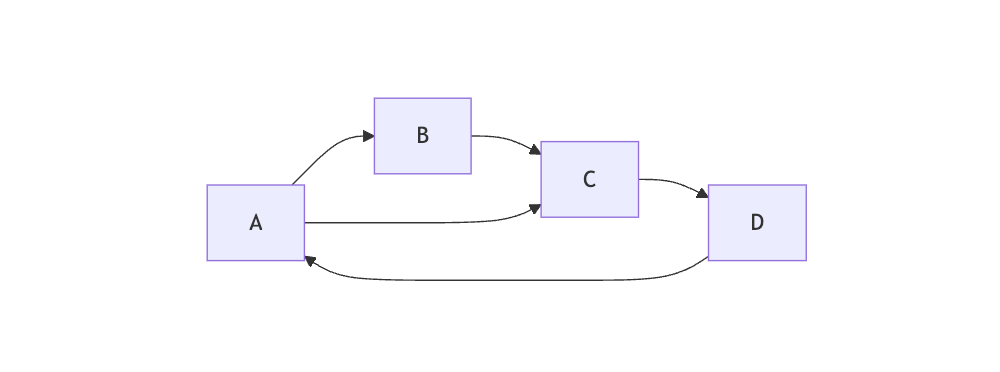
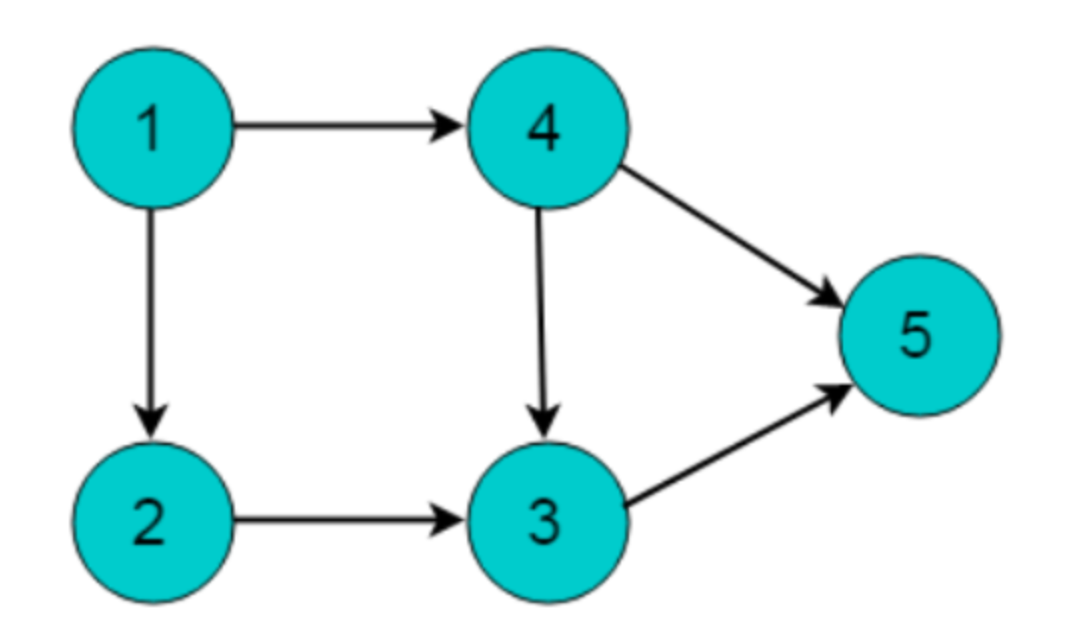
有向无环图(DAG - Directed Acyclic Graph)
- 有向图且无环(无法回到起点),该图常用于任务调度、依赖关系等,我们直接看示例
说完了图的基本概念,下面我们来说一下图的存储,这个也是非常重要的知识点
邻接矩阵存储
邻接矩阵的基本概念
邻接矩阵(Adjacency Matrix)是用二维数组来表示图的一种方法。对于有n个顶点的图,邻接矩阵是一个n×n的矩阵。
基本原理:
矩阵中的元素 matrix[i][j] 表示顶点i到顶点j的关系
对于无权图:1表示有边,0表示无边
对于加权图:存储边的权重
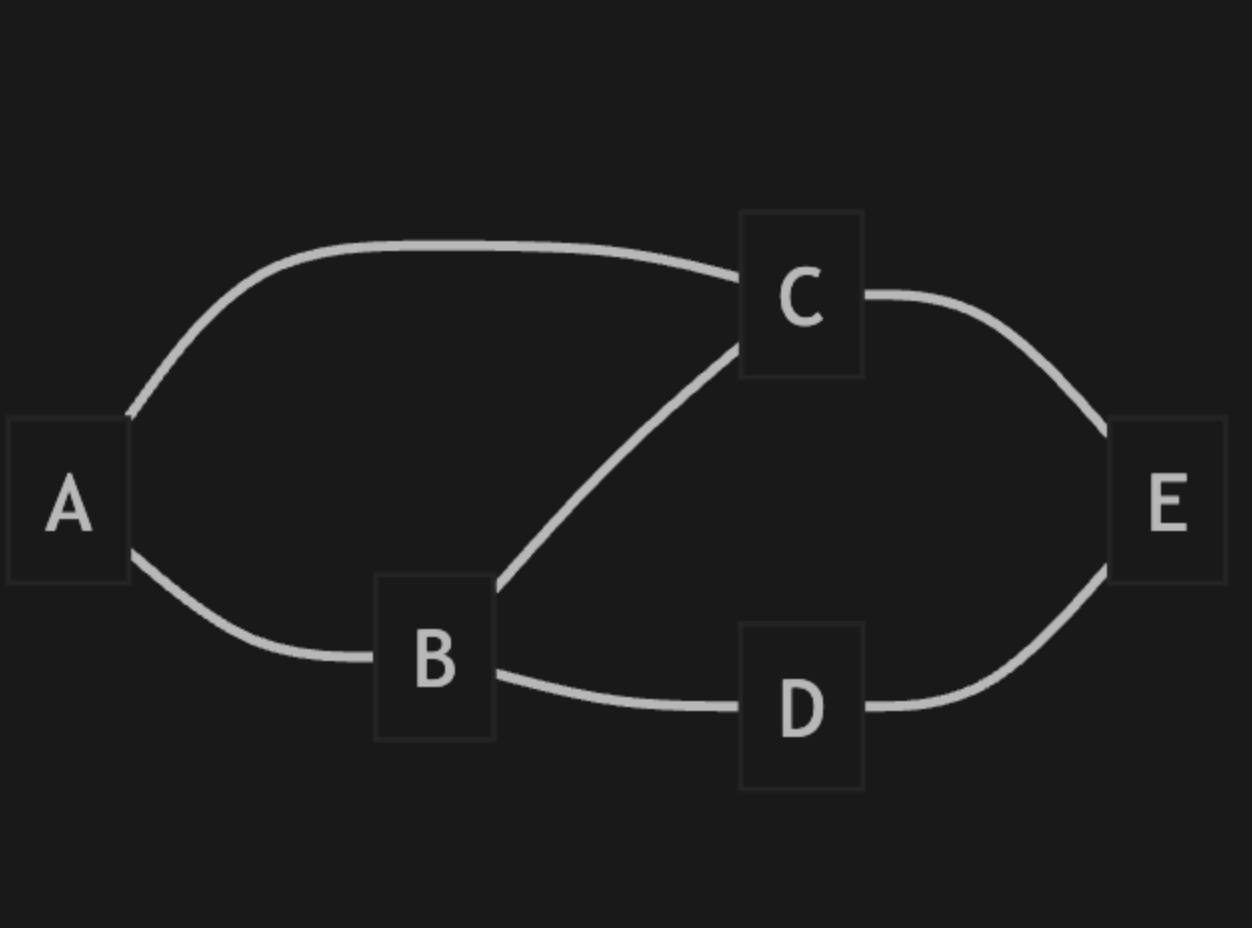
下面表格用来模拟一个 5X5 的二维数组,那在邻接矩阵中则存储为
A,B,C,D,E 节点在数组中对应的存储位置为 0,1,2,3,4
0 1 1 0 0
1 0 1 1 0
1 1 0 0 1
0 1 0 0 1
0 0 1 1 0
我们以 节点 A举例,他有到 B 和 C 的边,没有到 D E 的边,那么 matrix[0][1] = 1 , matrix[0][2] = 1, matrix[0][3] = 0, matrix[0][4] = 0
邻接矩阵的实现方式
基础无权图实现:
class AdjacencyMatrix {
private:
int numVertices;
vector<vector<int>> matrix;
public:
// 构造函数
AdjacencyMatrix(int vertices) : numVertices(vertices) {
matrix.resize(vertices, vector<int>(vertices, 0));
}
// 添加边(无向图)
void addEdge(int source, int destination) {
if (isValidVertex(source) && isValidVertex(destination)) {
matrix[source][destination] = 1;
matrix[destination][source] = 1; // 无向图对称
}
}
// 添加有向边
void addDirectedEdge(int source, int destination) {
if (isValidVertex(source) && isValidVertex(destination)) {
matrix[source][destination] = 1;
}
}
// 删除边(无向图)
void removeEdge(int source, int destination) {
if (isValidVertex(source) && isValidVertex(destination)) {
matrix[source][destination] = 0;
matrix[destination][source] = 0;
}
}
// 检查边是否存在
bool hasEdge(int source, int destination) {
if (isValidVertex(source) && isValidVertex(destination)) {
return matrix[source][destination] == 1;
}
return false;
}
// 获取顶点的度数(无向图)
int getDegree(int vertex) {
if (!isValidVertex(vertex)) return -1;
int degree = 0;
for (int i = 0; i < numVertices; i++) {
if (matrix[vertex][i] == 1) {
degree++;
}
}
return degree;
}
// 获取顶点的出度(有向图)
int getOutDegree(int vertex) {
if (!isValidVertex(vertex)) return -1;
int outDegree = 0;
for (int i = 0; i < numVertices; i++) {
if (matrix[vertex][i] == 1) {
outDegree++;
}
}
return outDegree;
}
// 获取顶点的入度(有向图)
int getInDegree(int vertex) {
if (!isValidVertex(vertex)) return -1;
int inDegree = 0;
for (int i = 0; i < numVertices; i++) {
if (matrix[i][vertex] == 1) {
inDegree++;
}
}
return inDegree;
}
// 获取所有邻接顶点
vector<int> getNeighbors(int vertex) {
vector<int> neighbors;
if (!isValidVertex(vertex)) return neighbors;
for (int i = 0; i < numVertices; i++) {
if (matrix[vertex][i] == 1) {
neighbors.push_back(i);
}
}
return neighbors;
}
// 打印邻接矩阵
void printMatrix() {
cout << "邻接矩阵:" << endl;
cout << " ";
for (int i = 0; i < numVertices; i++) {
cout << i << " ";
}
cout << endl;
for (int i = 0; i < numVertices; i++) {
cout << i << ": ";
for (int j = 0; j < numVertices; j++) {
cout << matrix[i][j] << " ";
}
cout << endl;
}
}
// 统计边的总数
int getEdgeCount() {
int edgeCount = 0;
for (int i = 0; i < numVertices; i++) {
for (int j = i + 1; j < numVertices; j++) { // 只计算上三角,避免重复
if (matrix[i][j] == 1) {
edgeCount++;
}
}
}
return edgeCount;
}
int getVertexCount() const {
return numVertices;
}
private:
bool isValidVertex(int vertex) {
return vertex >= 0 && vertex < numVertices;
}
};
邻接矩阵的空间和时间复杂度分析
空间复杂度:O(V²)
- 需要一个V×V的二维数组
- 无论图中实际有多少条边,都需要V²的空间
- 对于稀疏图(边数远小于V²)来说,空间浪费严重
时间复杂度分析:
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 添加边 | O(1) | 直接设置矩阵元素 |
| 删除边 | O(1) | 直接重置矩阵元素 |
| 查找边 | O(1) | 直接访问矩阵元素 |
| 获取所有邻接顶点 | O(V) | 遍历一行 |
| 获取顶点度数 | O(V) | 遍历一行或一列 |
| 图的遍历 | O(V²) | 需要检查每个矩阵元素 |
根据上面的内容,大家对邻接矩阵,掌握应该比较清晰了,咱们来看一下邻接矩阵的优缺点吧
邻接矩阵的优缺点
优点:
- 快速查询:检查两个顶点是否相邻只需O(1)时间
- 简单实现:数据结构简单,易于理解和实现
- 适合稠密图:当图的边数接近V²时,空间利用率高
- 支持快速计算:便于进行矩阵运算,如计算可达性
- 删除顶点简单:删除一行一列即可
缺点:
- 空间浪费:对于稀疏图,大量存储空间被浪费
- 遍历效率低:获取所有邻接顶点需要O(V)时间
- 添加顶点困难:需要重新分配更大的矩阵
- 不适合动态图:顶点数量变化时效率低
邻接表存储
邻接表的基本概念
邻接表(Adjacency List)是图的另一种重要存储方式。它为每个顶点维护一个链表(或动态数组),存储该顶点的所有邻接顶点。
是不是看着有点抽象?嗯,我觉得也有点,我们直接来看个图吧
上面这个图,我们用邻接表存储的话,应该怎么存储呢?
基本原理:
- 使用一个数组存储所有顶点
- 每个顶点对应一个链表,链表中存储与该顶点相邻的所有顶点
- 对于加权图,链表中还需要存储边的权重
邻接表可以使用数组、链表、vector,这块我们画个示意图,大家就一目了然了
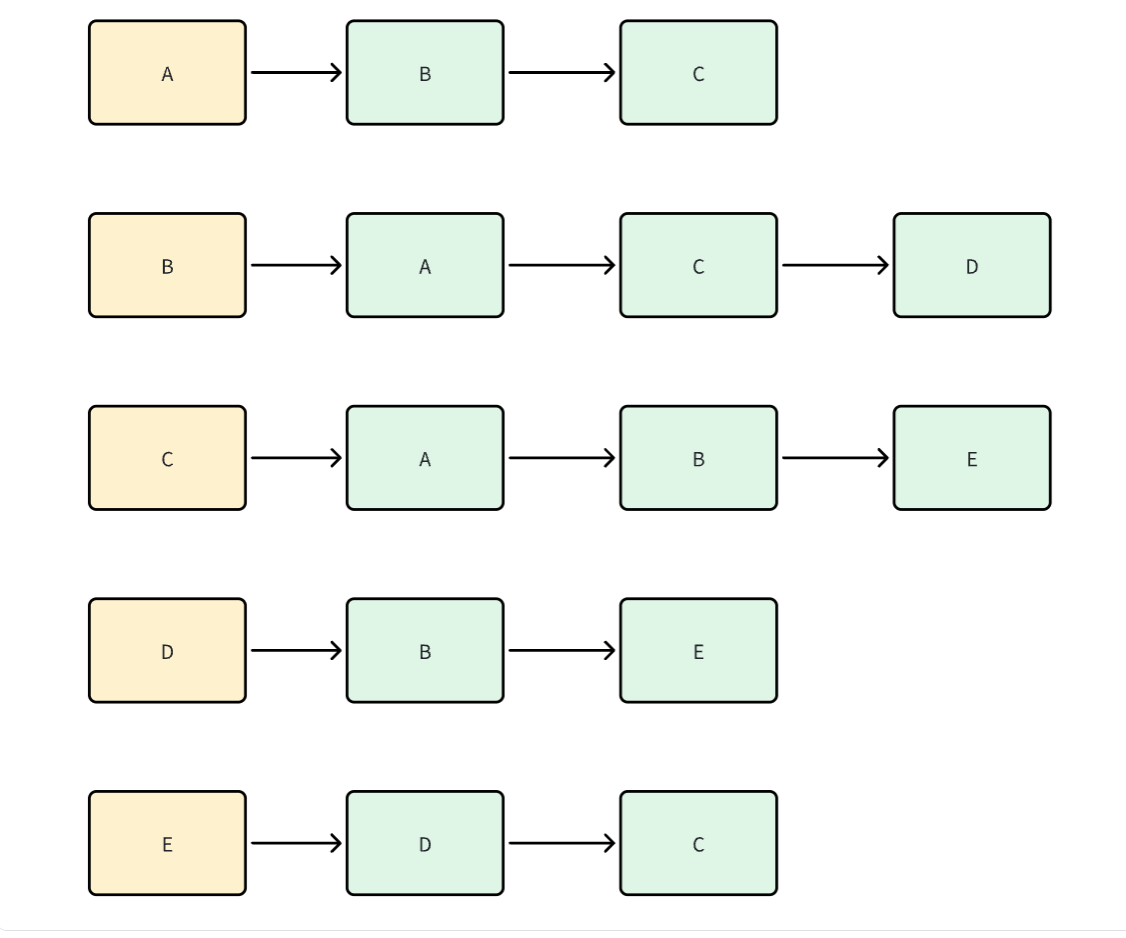
这里黄色的代表起点,绿色代表和其有链接的点,通过邻接表来存储图的话,则是一个复合数据结构
例如
vector<vector<int>> adjList;
vector<ListNode*> adjList;
邻接表的空间和时间复杂度分析
空间复杂度:O(V + E)
- 需要存储V个顶点
- 每条边在邻接表中被存储一次(有向图)或两次(无向图)
- 对于稀疏图非常节省空间
时间复杂度分析:
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 添加边 | O(1) | 在链表头部或vector末尾添加 |
| 删除边 | O(V) | 需要在邻接表中查找 |
| 查找边 | O(V) | 最坏情况需要遍历整个邻接表 |
| 获取所有邻接顶点 | O(度数) | 直接返回邻接表 |
| 获取顶点度数 | O(1) | 返回邻接表大小 |
| 图的遍历 | O(V + E) | 访问每个顶点和边一次 |
邻接表 vs 邻接矩阵对比
详细对比分析:
| 特性 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 空间复杂度 | O(V²) | O(V + E) |
| 添加边 | O(1) | O(1) |
| 删除边 | O(1) | O(V) 最坏 |
| 查找边 | O(1) | O(V) 最坏 |
| 遍历所有邻接顶点 | O(V) | O(度数) |
| 适用图类型 | 稠密图 | 稀疏图 |
| 内存使用 | 固定 | 动态 |
| 缓存友好性 | 好 | 一般 |
下面来给大家说一下图的遍历方式
深度优先搜索(DFS)
深度优先搜索(Depth-First Search,DFS)是图遍历的基本算法之一,它的特点是尽可能深地搜索图的分支。
DFS算法原理
基本思想
DFS的核心思想是:
- 从一个顶点开始访问
- 访问该顶点的一个未访问的邻接顶点
- 递归地对该邻接顶点执行DFS
- 如果没有未访问的邻接顶点,则回溯到上一个顶点
- 重复上述过程直到所有可达顶点都被访问
可以理解为尽可能深的找节点
就比如上面的 DFS序列,从 A 开始遍历的话,则可以是 ABDEC,ABCED
时间复杂度和空间复杂度
- 时间复杂度:O(V + E),其中V是顶点数,E是边数
- 空间复杂度:O(V),主要用于存储访问状态和递归栈
广度优先搜索
广度优先搜索(Breadth-First Search,BFS)是另一种基本的图遍历算法,与DFS不同,BFS采用"先访问邻居,再访问邻居的邻居"的策略。BFS特别适合求解最短路径、层次遍历等问题。
BFS算法原理
基本思想
BFS的核心思想是:
- 从起始顶点开始,将其加入队列
- 从队列中取出一个顶点并访问
- 将该顶点的所有未访问邻接顶点加入队列
- 重复步骤2-3直到队列为空
这个图的BFS 搜索序列为,ABCDE、ACBED
时间复杂度和空间复杂度
- 时间复杂度:O(V + E),其中V是顶点数,E是边数
- 空间复杂度:O(V),主要用于存储访问状态和队列
BFS的重要性质
- 层次性:BFS按照距离起始顶点的层次进行遍历
- 最短路径:在无权图中,BFS能找到最短路径(边数最少)
- 完整性:BFS能访问到所有与起始顶点连通的顶点




